Car Overspeeding Detection Project
Our proposed project aims to develop a system that detects cars driving
at speeds over specified limit and inform concerned authorities
immediately. Road accidents occurrences have increased recently so there
needs to be a system that allows to detect overspeeding cars. Current
speed detection systems are handheld guns held by police personnel that
allow them to check car speed and then manually inform authorities about
the vehicle. Whereas this proposed system does not need any human
interception and records car speed as well as wirelessly informs
authorities of overspeeding detections.
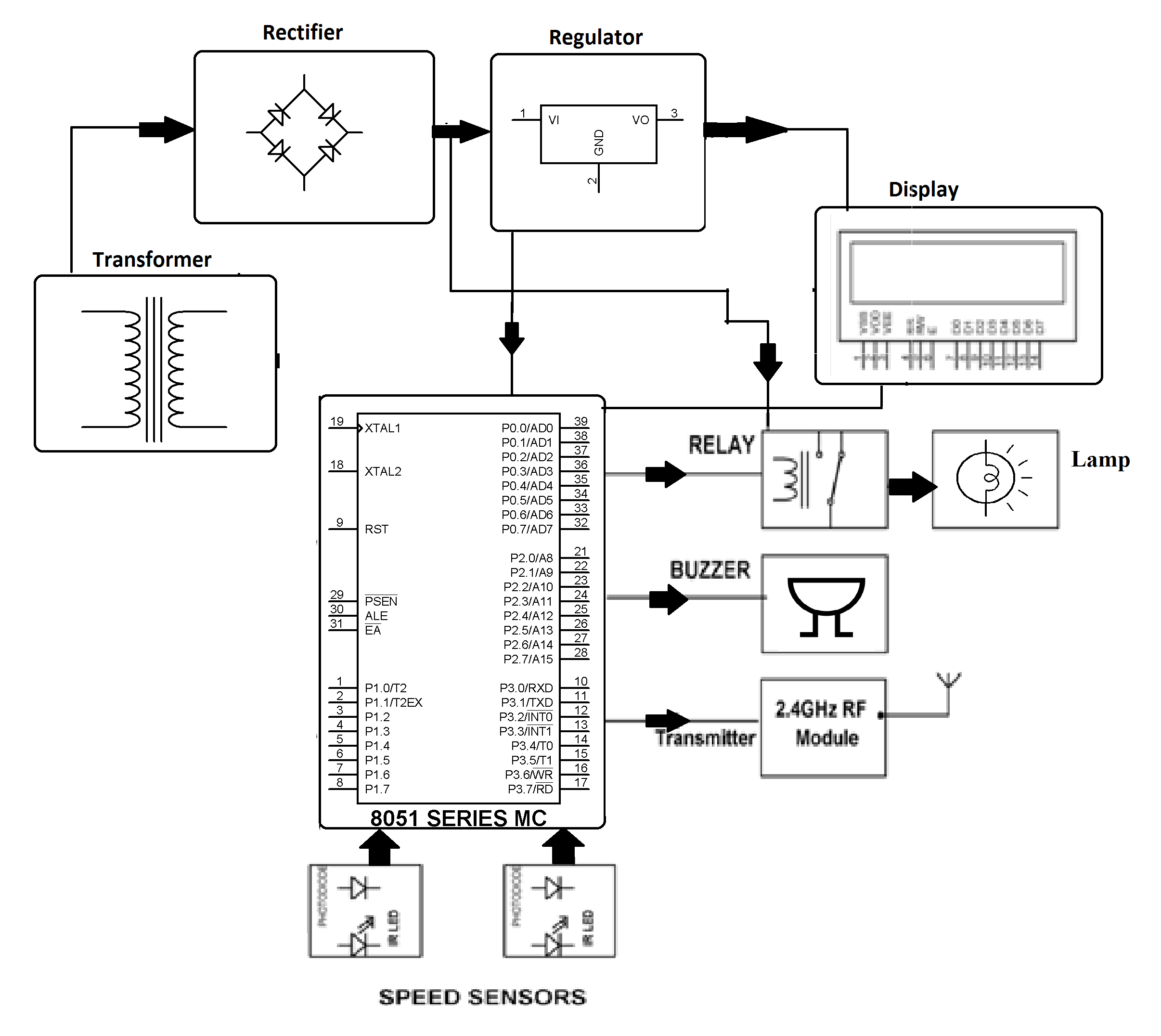
The system first calculates the time required by the specific car for
moving from first point to the second. Based on this data it calculates
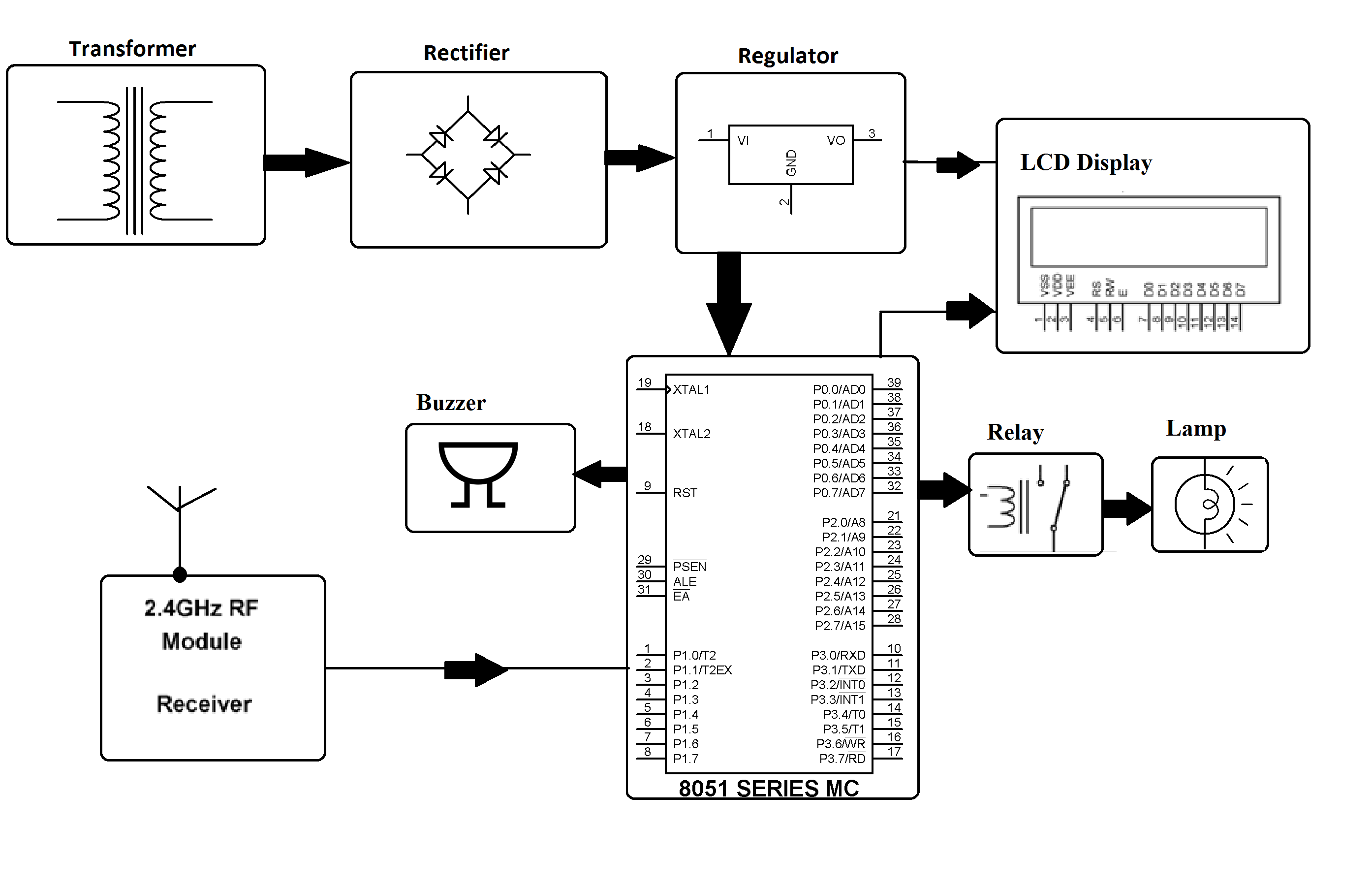
the car speed. This data is gathered and then transmitted by the system
wirelessly to concerned authorities at a remote location. The mechanism
consists of IT transmitter- receiver pair that work in combination for
vehicle detection purpose. The microcontroller is now used to process
this data and calculate the time required by vehicle to travel from one
point to the other. Depending upon this time it now calculates vehicle
speed as well as displays this on an LCD display. The system also sends
this data wirelessly. It sounds a buzzer alarm if an overspeed vehicle
is detected.
Hardware Specifications
|
Software Specifications
|
|
 |